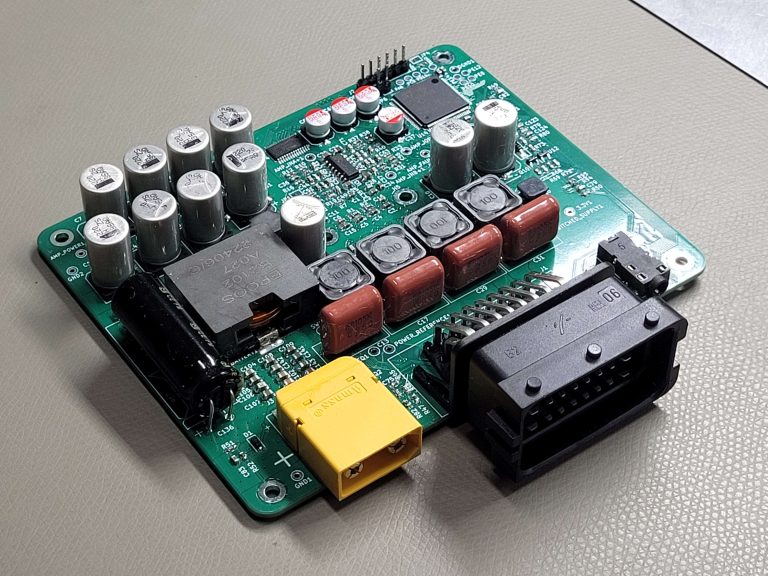
Celem projektu było opracowanie prototypowego dwukanałowego wzmacniacza audio klasy D, przeznaczonego do subwoofera samochodowego, z docelową mocą wyjściową 2 x 150W przy 4Ω. Projekt został ukierunkowany na wykorzystanie elementów elektronicznych dedykowanych dla branży automotive, zapewniających wysoką niezawodność i trwałość. Sterowanie wzmacniaczem odbywa się za pomocą mikrokontrolera, a cyfrowy przedwzmacniacz został zrealizowany na procesorze sygnałowym DSP, co zapewnia precyzyjne przetwarzanie dźwięku i wysoką jakość audio.
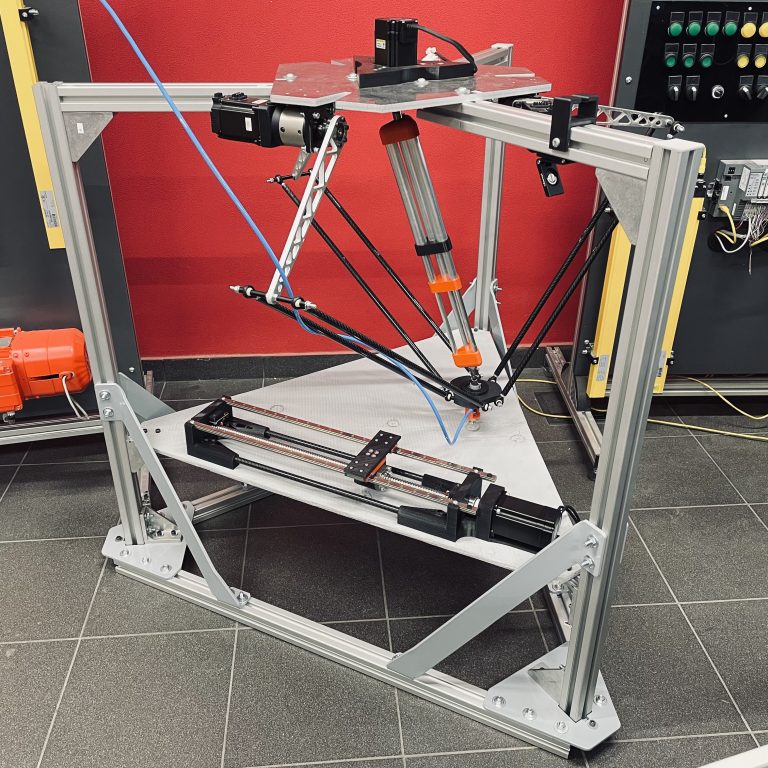
Robot delta z system wizyjnym
04.2021 – 10.2023, 10.2024 – kontynuowany
Celem projektu było zbudowanie robota typu delta do automatycznego sortowania batonów czekoladowych, wykorzystującego zaawansowany system wizyjny oraz nowoczesne technologie sterowania.
Stworzyliśmy od podstaw robota delta, którego sterowanie zrealizowaliśmy na mikrokontrolerze STM32. Robot został wyposażony w serwonapędy, które były skomunikowane w sieci CANopen, co zapewniło precyzyjne i zsynchronizowane ruchy. Kluczowym elementem projektu był trójwymiarowy system wizyjny oparty na sieci neuronowej, który umożliwiał wykrywanie i sortowanie batonów czekoladowych. Dodatkowo, robot został wyposażony w czwartą oś obrotową, co zwiększyło jego zdolność do manipulacji obiektami.
07.2023 – kontynuowany
Cela edukacyjna z robotem SCARA
Celem było pełne wykorzystanie potencjału robota SCARA marki Epson, który dotychczas pozostawał niewykorzystany, poprzez stworzenie stanowiska dydaktycznego do nauki robotyki w ramach zajęć z Podstaw Robotyki.
W ramach projektu skonstruowano kompletną konstrukcję mechaniczną, która stała się bazą dla robota. Przeprowadziliśmy instalację elektryczną oraz pneumatyczną, niezbędną do obsługi robota oraz urządzeń peryferyjnych. Zadbaliśmy również o bezpieczeństwo, implementując zaawansowany system ochrony stanowiska. Dodatkowo, zintegrowaliśmy system wizyjny, który umożliwia rozpoznawanie obiektów i sterowanie robotem w sposób dynamiczny.
Projekt robota kroczącego
04.2022 – 11.2023
Nasze Koło Naukowe realizowało projekt robota kroczącego, który wykorzystuje 12 serwomechanizmów rozmieszczonych w czterech nogach (trzy na każdą nogę). Sterowanie robotem odbywa się za pomocą mikrokontrolera STM32, który otrzymuje komendy z aplikacji komputerowej poprzez Wi-Fi, umożliwiając zdalne sterowanie robotem. Robot jest wyposażony w czujnik odległości oraz czujnik IMU, które dostarczają danych o przeszkodach i nachyleniu, a następnie przetwarzane są one w algorytmie sterowania, który generuje trajektorie ruchu nóg. Aplikacja sterująca, stworzona w silniku Godot, pozwala na wizualizację robota oraz wydawanie komend, zarówno do poruszania się, jak i testowania poszczególnych osi.
04.2022 – 03.2024
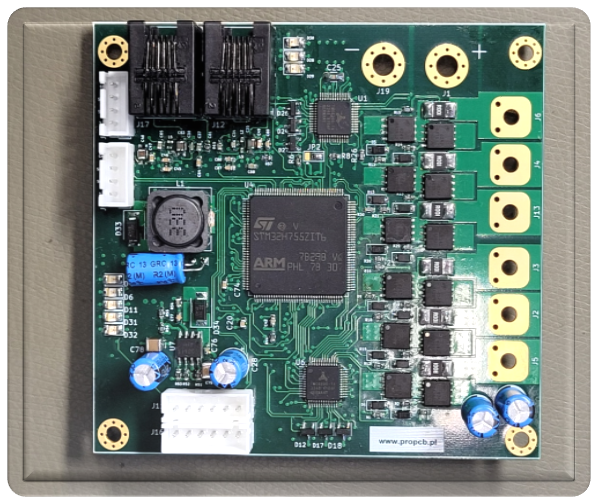
Sterownik BLDC z sterowaniem wektorowym
Celem projektu było zaprojektowanie tańszego i wydajnego sterownika do silników bezszczotkowych BLDC z funkcją sterowania wektorowego, dedykowanego do obsługi dwóch silników. W tym celu opracowaliśmy wielowarstwową płytkę PCB, która zawiera kluczowe komponenty, takie jak dwurdzeniowy mikrokontroler STM32H7, drivery tranzystorów, przetwornice napięcia oraz tranzystory w układzie mocy. Płytka została również wyposażona w układ umożliwiający komunikację z innymi urządzeniami poprzez sieć CAN-FD.
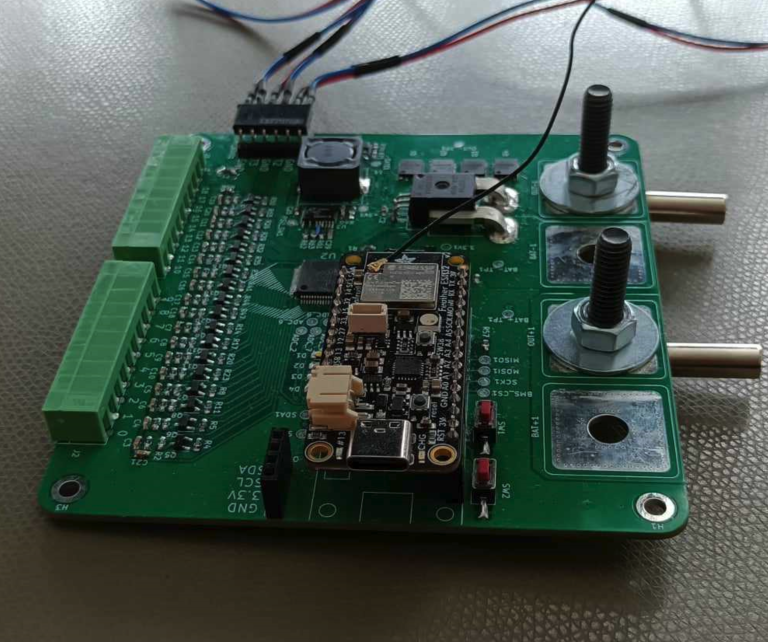
BMS - Battery Management System
07.2023 – 05.2024
Celem projektu było opracowanie Battery Management System (BMS) do zarządzania pakietem baterii w akumulatorze. Zaprojektowaliśmy płytkę PCB, na której głównym układem sterującym jest mikrokontroler ESP32. System umożliwia monitorowanie i zarządzanie do 18 baterii w pakiecie, wykorzystując komunikację Wi-Fi do przesyłania danych. Dodatkowo, stworzyliśmy aplikację internetową, która dostarcza użytkownikom informacji na temat stanu baterii, w tym poziomu naładowania, zużycia oraz innych kluczowych parametrów. Nasz BMS zapewnia efektywne zarządzanie energią, a jednocześnie umożliwia zdalny dostęp do informacji o stanie baterii.
10.2022 – 06.2024
Ploter 4.0
Celem projektu było zaprojektowanie przemysłowego plotera 4.0, urządzenia służącego do precyzyjnego wycinania lub rysowania elementów na płaskiej powierzchni. W ramach projektu opracowano konstrukcję mechaniczną, wyposażoną w silniki krokowe, które zapewniają dokładne i płynne ruchy. Sterowanie ploterem odbywa się za pomocą mikrokontrolera Arduino, który komunikuje się z silnikami poprzez sygnały PWM. Dodatkowo stworzono intuicyjną aplikację GUI, umożliwiającą łatwe i efektywne sterowanie urządzeniem, co zwiększa jego funkcjonalność i wygodę użytkowania.
Własna linia produkcyjna w symulatorze Factory IO
03.2021 – 09.2021
Celem projektu było stworzenie symulacji linii produkcyjnej w symulatorze Factory IO, co stanowi doskonałe wprowadzenie do programowania sterowników PLC. W ramach projektu nasi członkowie, specjalizujący się w programowaniu PLC, zaprojektowali symulowaną linię produkcyjną, którą zintegrowali ze sterownikiem Siemens S7-300. Sterownik ten zarządzał pracą maszyn w symulacji, co pozwoliło na realistyczne odwzorowanie działania linii produkcyjnej. Projekt ten nie tylko pozwala na naukę programowania sterowników PLC, ale także daje praktyczne doświadczenie w rozwiązywaniu problemów, które mogą pojawić się przy pracy z rzeczywistymi urządzeniami przemysłowymi.