Nasz najnowszy projekt w Studenckim Kole Naukowym “Control Engineers” to duża platforma robotyczna jeżdżąca, oparta na zaawansowanych kołach Mecanum. Projekt ten łączy najnowsze technologie w dziedzinie automatyki, robotyki i sztucznej inteligencji, stanowiąc ważny krok naprzód w naszej działalności badawczo-rozwojowej.
Konstrukcja mechaniczna i napędowa
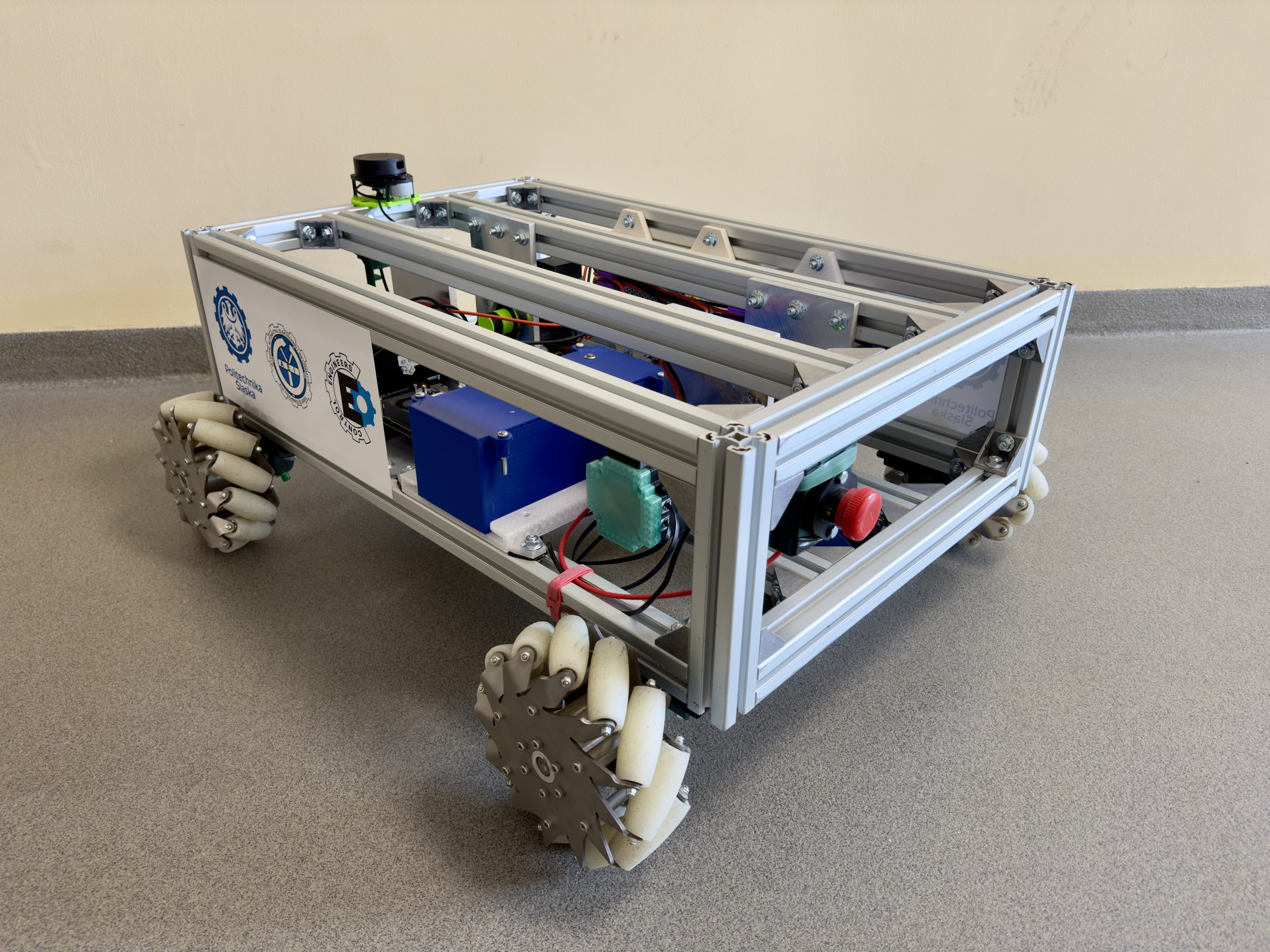
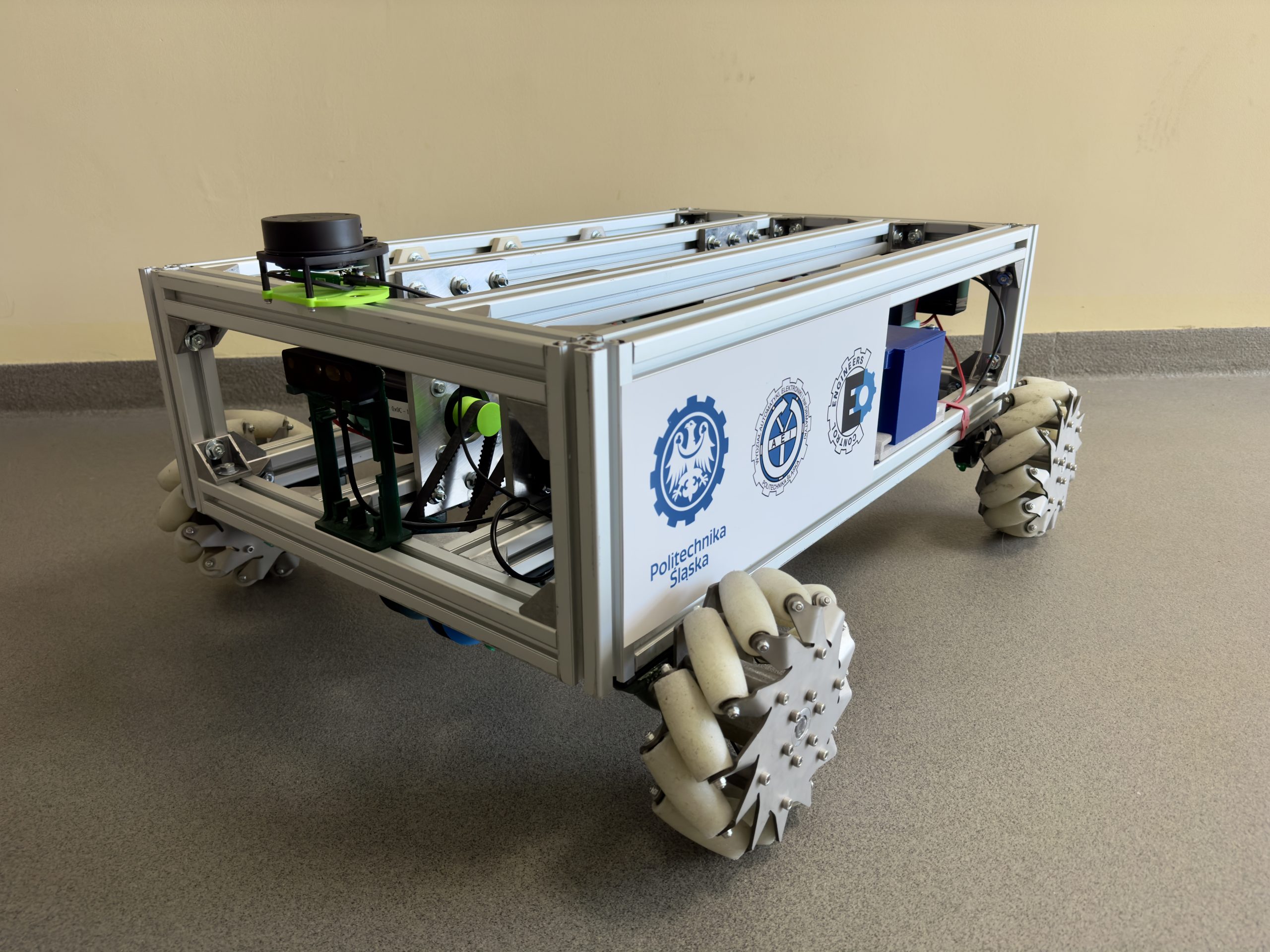
Platforma mobilna została zaprojektowana z myślą o maksymalnej wszechstronności i precyzji ruchu. Dzięki zastosowaniu kół Mecanum robot jest w stanie poruszać się w dowolnym kierunku bez potrzeby zmiany orientacji, co daje mu wyjątkową zwrotność w trudnych i ograniczonych przestrzeniach.
Platforma jest napędzana przez cztery silniki BLDC o mocy 440 W każdy. Sterowanie napędami odbywa się za pośrednictwem zaawansowanych sterowników silników BLDC Moteus-n1, które są połączone z mikrokontrolerem STM32H7 poprzez sieć komunikacyjną CAN-FD. Takie rozwiązanie zapewnia nie tylko dużą moc, ale także precyzyjne i płynne sterowanie ruchem.
Sterowanie i przetwarzanie danych
Mózgiem naszego robota jest mikrokomputer Nvidia Jetson Orin Nano, na którym uruchomiliśmy ROS2 Humble (Robot Operating System). Jest to potężne narzędzie umożliwiające integrację różnych systemów i czujników, a także realizację zaawansowanych algorytmów sztucznej inteligencji. Dzięki temu nasza platforma jest gotowa do realizacji skomplikowanych zadań autonomicznych.
Systemy wizyjne i nawigacja
Robot został wyposażony w kamery stereo Luxonis Oak-D Pro, które umożliwiają obrazowanie trójwymiarowej przestrzeni. To rozwiązanie pozwala na precyzyjne wykrywanie i unikanie przeszkód, a także na zaawansowane przetwarzanie obrazu. Dodatkowo, zastosowaliśmy Lidar 2D do tworzenia dwuwymiarowych map otoczenia, co jest kluczowe dla nawigacji i planowania trasy.
Zasilanie i zarządzanie energią
Platforma zasilana jest przez dedykowany pakiet baterii, który jest zarządzany przez zaawansowany system zarządzania baterią (BMS). Zapewnia to nie tylko odpowiednią wydajność energetyczną, ale także bezpieczeństwo i długi czas działa naszego robota.
Podsumowanie
Projekt mobilnej platformy AMR jest w fazie intensywnych prac rozwojowych. Zespół “Control Engineers” nieustannie pracuje nad optymalizacją i integracją wszystkich komponentów, aby nasz robot osiągnął pełnię swoich możliwości. Jesteśmy przekonani, że nasze osiągnięcia przyczynią się do dalszego rozwoju technologii robotycznych i znajdą zastosowanie w wielu dziedzinach przemysłu.
{kind=link}