Znacie kogoś kto tworzy roboty takie jak w przemyśle?
Bo my tak i jesteśmy to my 
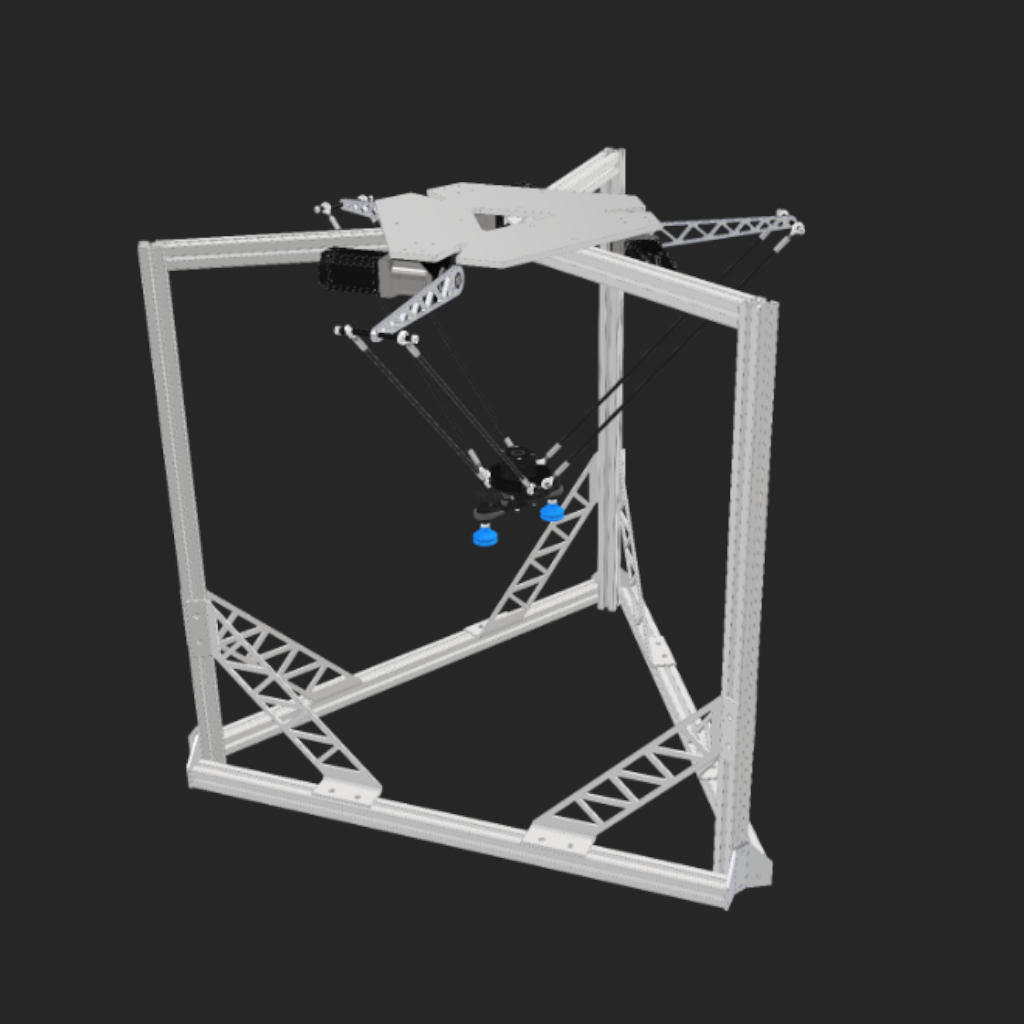
W ramach współpracy ze sponsorami projektu – firmami Aiut oraz Aptiv nasze studenckie koło naukowe zrealizowało projekt Robota typu delta z systemem wizyjnym 
Na nagraniu możecie zobaczyć tego właśnie robota aplikującego funkcję Pick&Place. Roboty takie jak ten wykorzystywane są w przemyśle m.in. do pakowania małych produktów do paczek. Umieszcza się je nad taśmociągiem i w połączeniu z systemem wizyjnym robot potrafi wykryć i złapać obiekt poruszający się po taśmociągu. Następnie obiekt jest pakowany do pudełka 
Ciekawym jest, że my jako klienci w sklepie, wybierając np. batona wyciągamy go z tego samego pudełka, do którego włożył go wcześniej taki robot! Nawet nie zdajemy sobie z tego w pełni sprawy 
To dla nas naturalne!
𝐓𝐞 𝐞𝐭𝐚𝐩𝐲 𝐬𝐚̨ 𝐣𝐮𝐳̇ 𝐳𝐚 𝐧𝐚𝐦𝐢!
𝐊𝐨𝐥𝐞𝐣𝐧𝐞 𝐩𝐥𝐚𝐧𝐨𝐰𝐚𝐧𝐞 𝐞𝐭𝐚𝐩𝐲 𝐩𝐫𝐨𝐣𝐞𝐤𝐭𝐮: