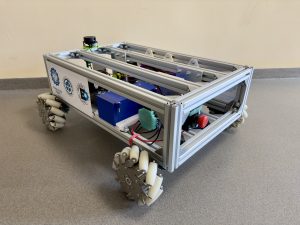
Platforma mobilna AMR
Nasz najnowszy projekt w Studenckim Kole Naukowym “Control Engineers” to duża platforma robotyczna jeżdżąca, oparta na zaawansowanych kołach Mecanum. Projekt ten łączy najnowsze technologie w
Nasz najnowszy projekt w Studenckim Kole Naukowym “Control Engineers” to duża platforma robotyczna jeżdżąca, oparta na zaawansowanych kołach Mecanum. Projekt ten łączy najnowsze technologie w
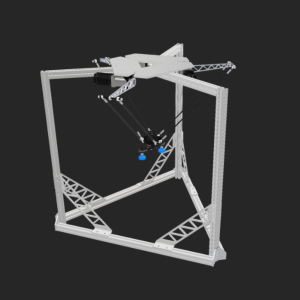
Projekt robota typu delta z systemem wizyjnym Znacie kogoś kto tworzy roboty takie jak w przemyśle?Bo my tak i jesteśmy to my W ramach współpracy

Własna linia produkcyjna w symulatorze Factory IO W naszym kole obecni są również programiści sterowników PLC 🙂 Już spory kawałek czasu minął od tego, gdy

Projekt robota kroczącego – układ sterowania Nasze koło naukowe realizuje projekt robota kroczącego. Zaprojektowaliśmy konstrukcję robota, która wykorzystuje serwomechanizmy. W każdej nodze są po 3

Współpraca z Firmą Aiut Świetna wiadomość! Sponsorem naszego koła została firma Aiut! Firma zdecydowała się na wsparcie projektu robota typu delta z systemem wizyjnym, za
