Platforma mobilna AMR
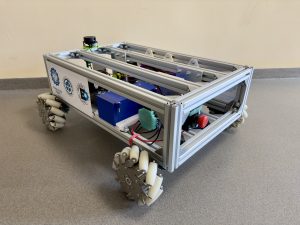
Nasz najnowszy projekt w Studenckim Kole Naukowym “Control Engineers” to duża platforma robotyczna jeżdżąca, oparta na zaawansowanych kołach Mecanum. Projekt ten łączy najnowsze technologie w

Robot o konstrukcji kinematycznej typu pies, wykorzystujący serwomechanizmy. Aplikacja do sterowania robotem oparta o silnik do gier.
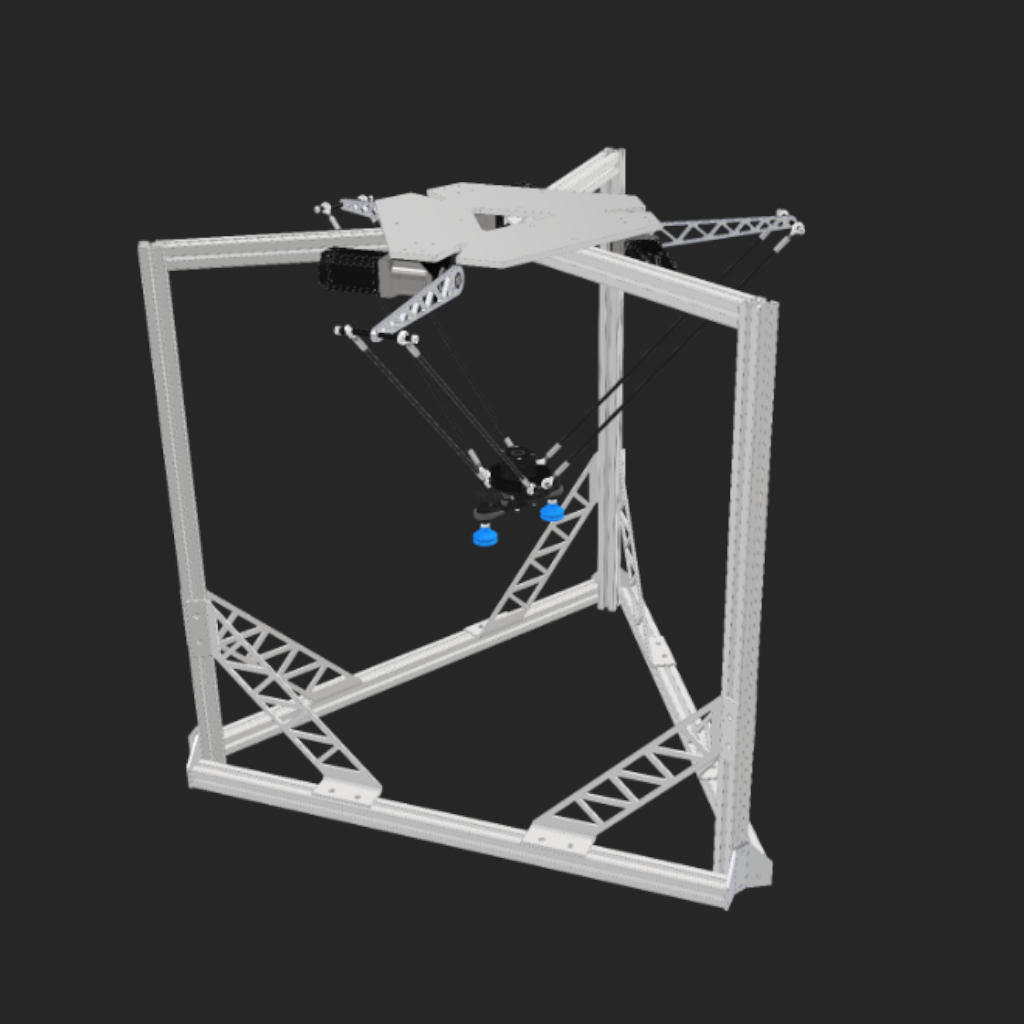
Robot typu delta z systemem wizyjnym opartym o sieci neuronowe oraz aplikacją dedykowaną do symulacji i programowania.
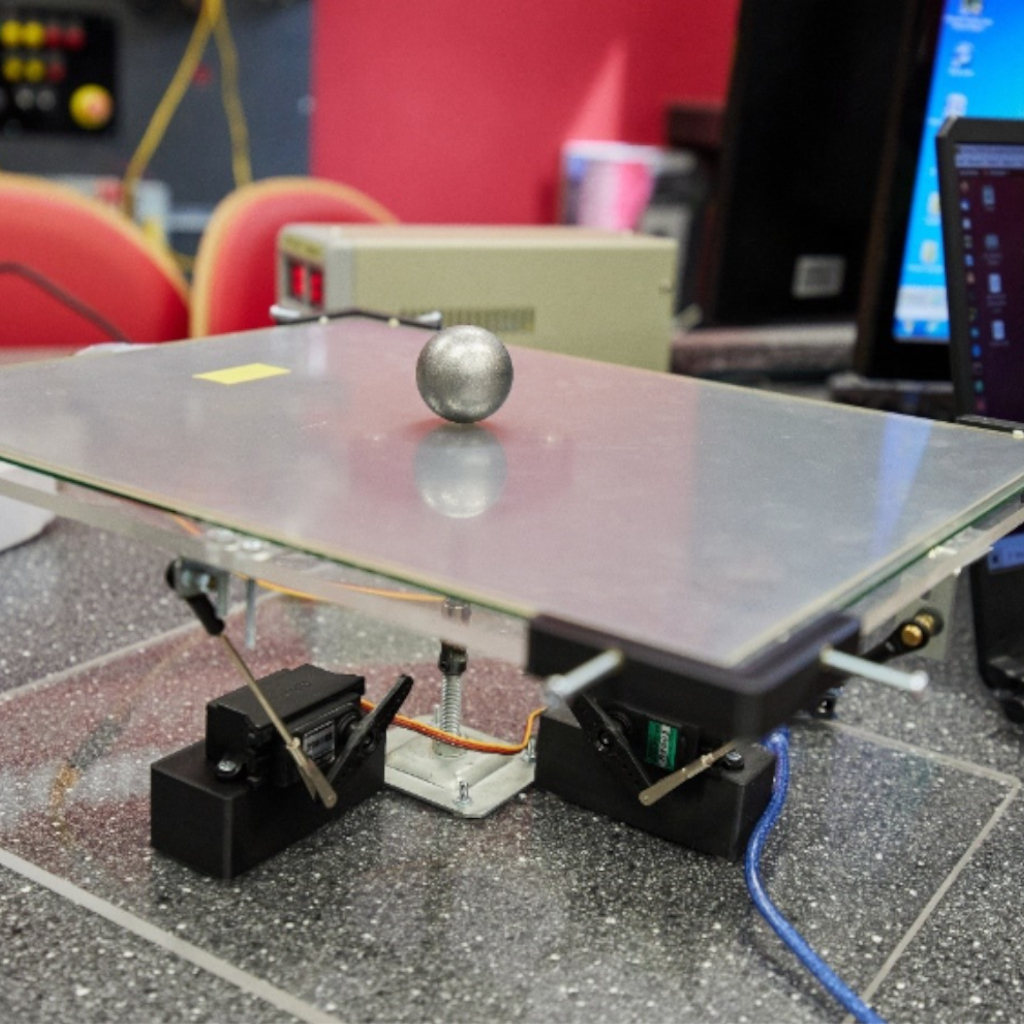
Platforma balansująca położenie kulki. W projekcie wykorzystano regulator PID oraz panel rezystancyjny.
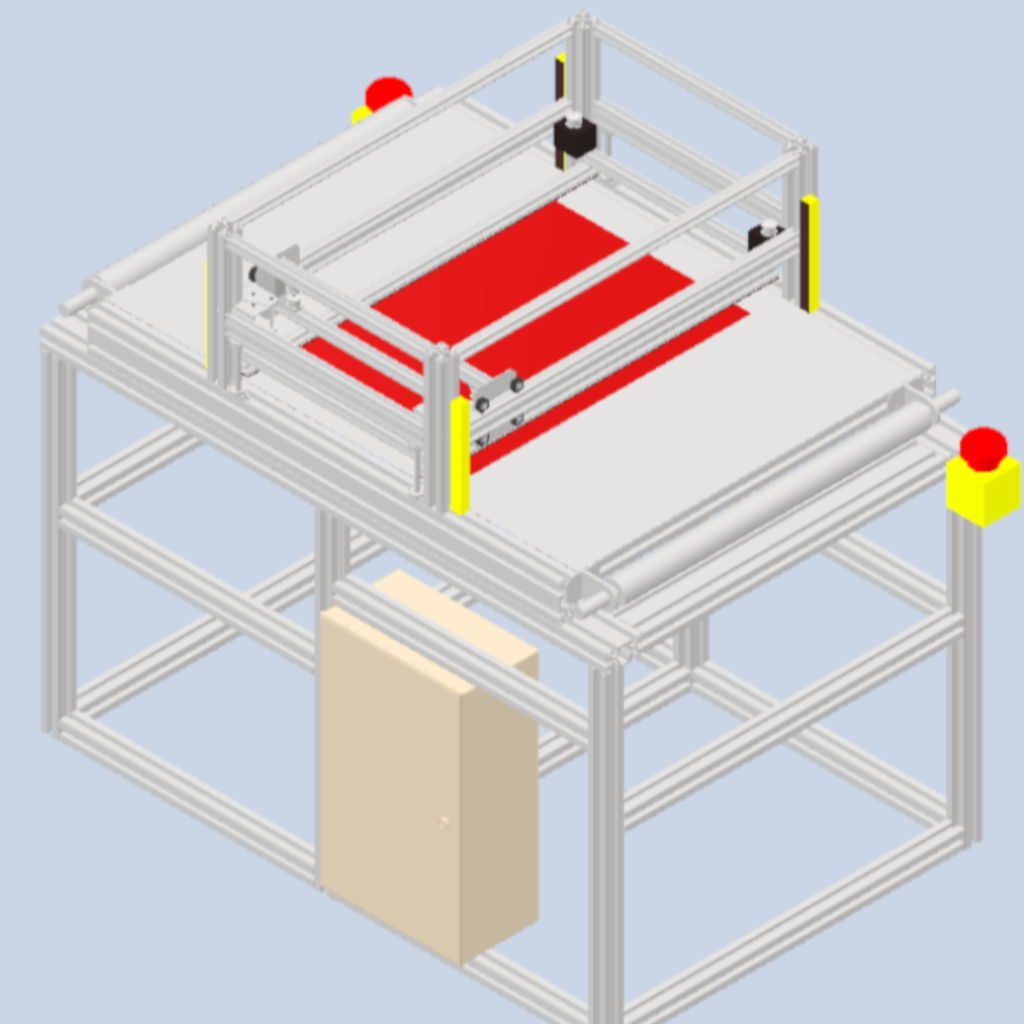
Stanowisko technik napędowych, systemów bezpieczeństwa i przemysłu 4.0 – ploter core XY.
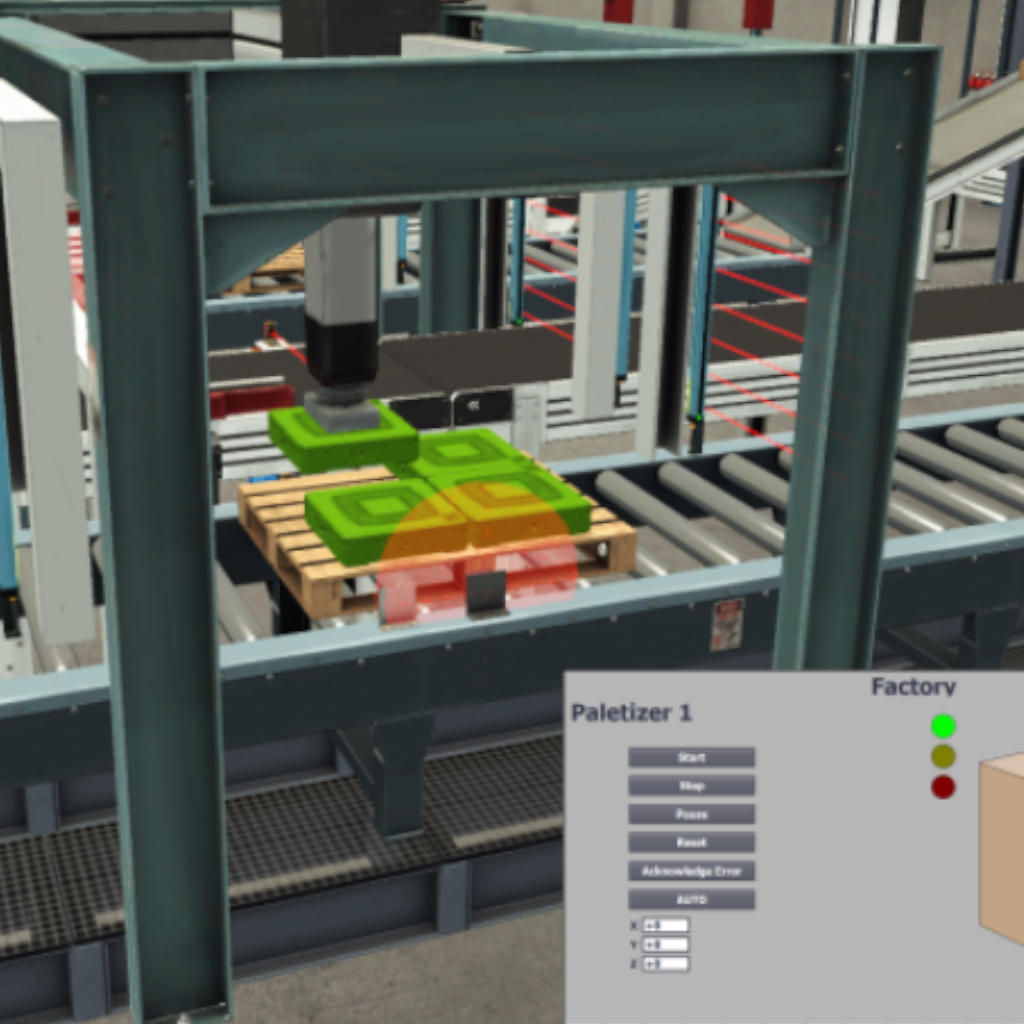
Symulacja wykonana w środowisku Factory IO. Algorytmy sterujące maszynami zaimplementowano na sterowniku PLC Siemens S7-300.
Nasz najnowszy projekt w Studenckim Kole Naukowym “Control Engineers” to duża platforma robotyczna jeżdżąca, oparta na zaawansowanych kołach Mecanum. Projekt ten łączy najnowsze technologie w
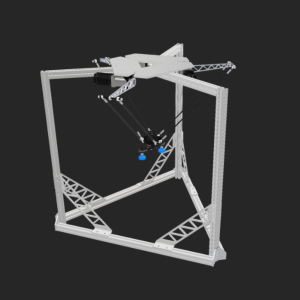
Projekt robota typu delta z systemem wizyjnym Znacie kogoś kto tworzy roboty takie jak w przemyśle?Bo my tak i jesteśmy to my W ramach współpracy
